Segmentación de instancias 2D con Mask R-CNN#
Un tipo diferente de segmentación es la denominada segmentación de instancias. La segmentación de instancias es una combinación de detección de objetos y segmentación de imágenes.
Se detecta cada objeto presente en una imagen, se obtienen sus cuadros delimitadores, se clasifica el objeto dentro del cuadro delimitador y se enmascara con un color único.
Se va a utilizar la arquitectura Mask R-CNN propuesta por [He et al., 2017], pertenecientes al FAIR (Facebook AI Research) extendiendo la arquitectura Faster R-CNN ([Girshick, 2015]) agregando una rama para predecir máscaras de segmentación en cada región de interés (RoI), en paralelo con la rama existente para clasificación y regresión del cuadro delimitador:
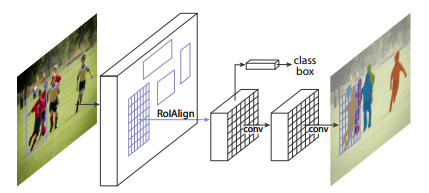
La rama de la máscara es un pequeño Fully Convolutional Network (FCN) ([Long et al., 2015]) aplicado a cada RoI, que predice una máscara de segmentación de píxel a píxel.
Faster R-CNN proveía de 2 salidas: un cuadro delimitador y una etiqueta con la clase que lo identifica. A ello Mask R-CNN añade una mascara que implica una alineación pixel a pixel más fina del objeto contenido en el cuadro delimitador.
[He et al., 2017] propusieron dos esquemas de arquitectura, una basada en una red residual ([He et al., 2016]) y otra en una red piramdial ([Lin et al., 2017]). En el siguiente gráfico se observan ambos esquemas de funcionamiento. Los paneles izquierdo/derecho muestran los cabezales (backbones) de las redes troncales ResNet C4 y FPN, respectivamente, a los que se agrega una rama de máscara. Los números indican la resolución espacial y los canales. Las flechas indican las capas conv, deconv o fc como se puede inferir del contexto (conv conserva la dimensión espacial mientras que deconv la aumenta). Todas las conversiones son 3 × 3, excepto la conversión de salida que es 1 × 1, las desconversiones son 2 × 2 con paso 2 y se usa ReLU en capas ocultas. A la izquierda: ‘res5’ denota la quinta etapa de ResNet, que por simplicidad se modifica para que la primera conv opere en un ROI de 7×7 con zancada 1. A la derecha: ‘×4’ denota una pila de cuatro conversiones consecutivas.

Existe en un modelo Mask R-CNN preentrenado que proporciona PyTorch basado en una red troncal ResNet-50-FPN.
El modelo espera imágenes en lotes para inferencia y todos los píxeles deben estar dentro del rango \([0, 1]\). Por lo tanto, el formato de entrada al modelo será \([N, C, H, W]\). Aquí \(N\) es el número de imágenes o el tamaño del lote, \(C\) es la dimensión del canal de color, y \((H, W)\) son la altura y la anchura de la imagen respectivamente. Es bastante simple y en el formato típico de PyTorch.
Sin embargo, el modelo genera mucho contenido. Es una combinación de detección de objetos y segmentación de imágenes. El modelo genera una lista de diccionarios que contienen los tensores resultantes. Formalmente, es del tipo List[Dict[Tensor]]. Con los siguientes contenidos, tomados del sitio web de PyTorch:
Cajas (boxes) (FloatTensor[N, 4]): los cuadros predichos en formato [x1, y1, x2, y2], con valores de x entre 0 y W y valores de y entre 0 y H.
Etiquetas (labels) (Int64Tensor[N]): las etiquetas predichas para cada imagen.
Puntuaciones (scores) (Tensor[N]): las puntuaciones de cada predicción.
Mascaras (masks) (UInt8Tensor[N, 1, H, W]): las máscaras predichas para cada instancia, en el rango 0-1. Para obtener las máscaras de segmentación final, se pueden establecer umbrales de las máscaras blandas, generalmente con un valor de 0,5 ( máscara >= 0.5).
Portanto, el diccionario contiene cuatro claves: boxes, labels, scores, y masks. Estas claves contienen los tensores resultantes como valores. Y hay que tener en cuenta que se deben considerar los valores de las máscaras que son mayores o iguales a 0.5.
Importación de las librerías necesarias#
import cv2
import numpy as np
import random
import torch
import argparse
from PIL import Image
import torchvision.models.segmentation
from torchvision.transforms import transforms as transforms
import os
import matplotlib.pyplot as plt
googleColaboratory = False
escribir_out = False ## Por defecto que no escriba el fichero de salida con las imagenes enmarcadas
downloadCOCOData = False
entrenamiento = False
if googleColaboratory:
import google as goo
goo.colab.drive.mount('/content/drive/')
image_path = "/content/drive/My Drive/Colab Notebooks/data/coco_images"
filename = "/content/drive/My Drive/Colab Notebooks/data/coco_images/cocoMaskRCNN.pt"
else:
image_path = "./data/coco_images"
filename = "data/coco_images/cocoMaskRCNN.pt"
Show code cell content
## N/A, no usado a partir de la versión 2017
## https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
COCO_INSTANCE_CATEGORY_NAMES = [
'__fondo__', 'persona', 'bicicleta', 'coche', 'motocicleta', 'avion', 'autobus',
'tren', 'camion', 'barco', 'semaforo', 'boca de incendios', 'N/A', 'STOP',
'parquimetro', 'banco', 'pajaro', 'gato', 'perro', 'caballo', 'oveja', 'vaca',
'elefante', 'oso', 'cebra', 'jirafa', 'N/A', 'mochila', 'paraguas', 'N/A', 'N/A',
'bolso', 'corbata', 'maleta', 'disco volador', 'esquis', 'snowboard', 'pelota',
'cometa', 'bate beisbol', 'guante beisbol', 'monopatin', 'tabla de surf', 'raqueta de tenis',
'botella', 'N/A', 'copa vino', 'taza', 'tenedor', 'cuchillo', 'cuchara', 'tazon',
'platano', 'manzana', 'sandwich', 'naranja', 'brocoli', 'zanahoria', 'perrito caliente', 'pizza',
'rosquilla', 'pastel', 'silla', 'sofa', 'planta en maceta', 'cama', 'N/A', 'mesa de comedor',
'N/A', 'N/A', 'inodoro', 'N/A', 'TV', 'portatil', 'raton', 'remoto', 'teclado', 'telefono celular',
'microondas', 'horno', 'tostador', 'fregadero', 'nevera', 'N/A', 'libro',
'reloj', 'jarron', 'tijeras', 'oso peluche', 'secador pelo', 'cepillo dientes', 'N/A'
]
coco_names = COCO_INSTANCE_CATEGORY_NAMES
COLORS = np.random.uniform(0, 255, size=(len(coco_names), 3))
threshold = 0.965 ## Valor del umbral por defecto
imageSize=(256,128)
coco_names[1], COLORS[1], len(coco_names)
('persona', array([215.85141083, 133.17405881, 64.89997035]), 92)
Función para obtener las salidas#
Se Escribe una función simple para obtener los resultados del modelo después de la inferencia. Esta función proporcionará todos los tensores de salida necesarios para una correcta visualización de los resultados. Esta función se llama get_outputs().
La función get_outputs() acepta tres parámetros de entrada. El primero es la imagen de entrada, el segundo es el modelo Mask R-CNN y el tercero es el valor umbral. El valor umbral es una puntuación predefinida por debajo de la cual descartaremos todas las salidas para evitar demasiados falsos positivos.
La función realiza la predicción de la imagen image con el modelo Mask R-CNN model que se vuelca sobre la variable outputs que contiene la estructura de diccionarios explicados anteriormente.
La variable outputs está preparada para manejar lotes de imagenes, aunque en este caso sólo se trata una única imagen por lo que se toman siempre los diccionario del elemento [0] de la lista.
La siguiente es la definición de la función.
Show code cell content
def get_boxes_out(boxes):
return [[(int(i[0]), int(i[1])), (int(i[0]) + int(i[2]), int(i[1]) + int(i[3]))] for i in boxes]
def get_names_out(labels):
return [coco_names[i] for i in labels]
def get_outputs(image, model, threshold):
with torch.no_grad():
# forward pass of the image through the modle
outputs = model(image)
# get all the scores
scores = list(outputs[0]['scores'].detach().cpu().numpy())
# index of those scores which are above a certain threshold
thresholded_preds_inidices = [scores.index(i) for i in scores if i > threshold]
thresholded_preds_count = len(thresholded_preds_inidices)
# get the masks
masks = (outputs[0]['masks']>0.5).squeeze().detach().cpu().numpy()
# discard masks for objects which are below threshold
masks = masks[:thresholded_preds_count]
# get the bounding boxes, in (x1, y1), (x2, y2) format
boxes = [[(int(i[0]), int(i[1])), (int(i[2]), int(i[3]))] for i in outputs[0]['boxes'].detach().cpu()]
# discard bounding boxes below threshold value
boxes = boxes[:thresholded_preds_count]
# get the classes labels
labels = [coco_names[i] for i in outputs[0]['labels']]
return masks, boxes, labels
Aplicar segmentación y dibujar cuadros delimitadores#
Una vez que se tienen las etiquetas, las máscaras y los cuadros delimitadores, hay que aplicar las máscaras de color en el objeto y dibujar también los cuadros delimitadores.
Nuevamente se escribirá una función muy simple para eso. La función es draw_segmentation_map() que acepta cuatro parámetros de entrada. Son imagen, máscaras, cajas y etiquetas. La imagen es la imagen original sobre la que se aplicará las máscaras resultantes y dibujará los cuadros delimitadores alrededor de los objetos detectados. Además, las etiquetas ayudarán a poner el nombre de la clase encima de cada objeto.
La siguiente es la definición de la función.
Show code cell content
def draw_segmentation_map(image, masks, boxes, labels):
alpha = 1
beta = 0.6 # transparency for the segmentation map
gamma = 0 # scalar added to each sum
for i in range(len(masks)):
red_map = np.zeros_like(masks[i]).astype(np.uint8)
green_map = np.zeros_like(masks[i]).astype(np.uint8)
blue_map = np.zeros_like(masks[i]).astype(np.uint8)
# apply a randon color mask to each object
color = COLORS[random.randrange(0, len(COLORS))]
red_map[masks[i] == 1], green_map[masks[i] == 1], blue_map[masks[i] == 1] = color
# combine all the masks into a single image
segmentation_map = np.stack([red_map, green_map, blue_map], axis=2)
#convert the original PIL image into NumPy format
image = np.array(image)
# convert from RGN to OpenCV BGR format
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
# apply mask on the image
cv2.addWeighted(image, alpha, segmentation_map, beta, gamma, image)
# draw the bounding boxes around the objects
cv2.rectangle(image, boxes[i][0], boxes[i][1], color=color,
thickness=2)
# put the label text above the objects
cv2.putText(image , labels[i], (boxes[i][0][0], boxes[i][0][1]-10),
cv2.FONT_HERSHEY_SIMPLEX, 1, color,
thickness=2, lineType=cv2.LINE_AA)
return image
Preparar el modelo y definir la transformación#
El siguiente paso es preparar el modelo Mask R-CNN.
Show code cell content
# initialize the model
from torchvision.models.detection.mask_rcnn import MaskRCNN_ResNet50_FPN_Weights
model = torchvision.models.detection.maskrcnn_resnet50_fpn(weights=MaskRCNN_ResNet50_FPN_Weights.COCO_V1, progress=True,
num_classes=91)
# set the computation device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# load the modle on to the computation device and set to eval mode
model.to(device).eval()
MaskRCNN(
(transform): GeneralizedRCNNTransform(
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
Resize(min_size=(800,), max_size=1333, mode='bilinear')
)
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): FrozenBatchNorm2d(256, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(512, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(1024, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(2048, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
)
(1): Conv2dNormActivation(
(0): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
)
(2): Conv2dNormActivation(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
)
(3): Conv2dNormActivation(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
)
(layer_blocks): ModuleList(
(0-3): 4 x Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
)
(extra_blocks): LastLevelMaxPool()
)
)
(rpn): RegionProposalNetwork(
(anchor_generator): AnchorGenerator()
(head): RPNHead(
(conv): Sequential(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1))
(bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
(roi_heads): RoIHeads(
(box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2)
(box_head): TwoMLPHead(
(fc6): Linear(in_features=12544, out_features=1024, bias=True)
(fc7): Linear(in_features=1024, out_features=1024, bias=True)
)
(box_predictor): FastRCNNPredictor(
(cls_score): Linear(in_features=1024, out_features=91, bias=True)
(bbox_pred): Linear(in_features=1024, out_features=364, bias=True)
)
(mask_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(14, 14), sampling_ratio=2)
(mask_head): MaskRCNNHeads(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(1): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(2): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(3): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(mask_predictor): MaskRCNNPredictor(
(conv5_mask): ConvTranspose2d(256, 256, kernel_size=(2, 2), stride=(2, 2))
(relu): ReLU(inplace=True)
(mask_fcn_logits): Conv2d(256, 91, kernel_size=(1, 1), stride=(1, 1))
)
)
)
El siguiente bloque de código define las transformaciones que aplicaremos a las imágenes.
# transform to convert the image to tensor
transform = transforms.Compose([
transforms.ToTensor()
])
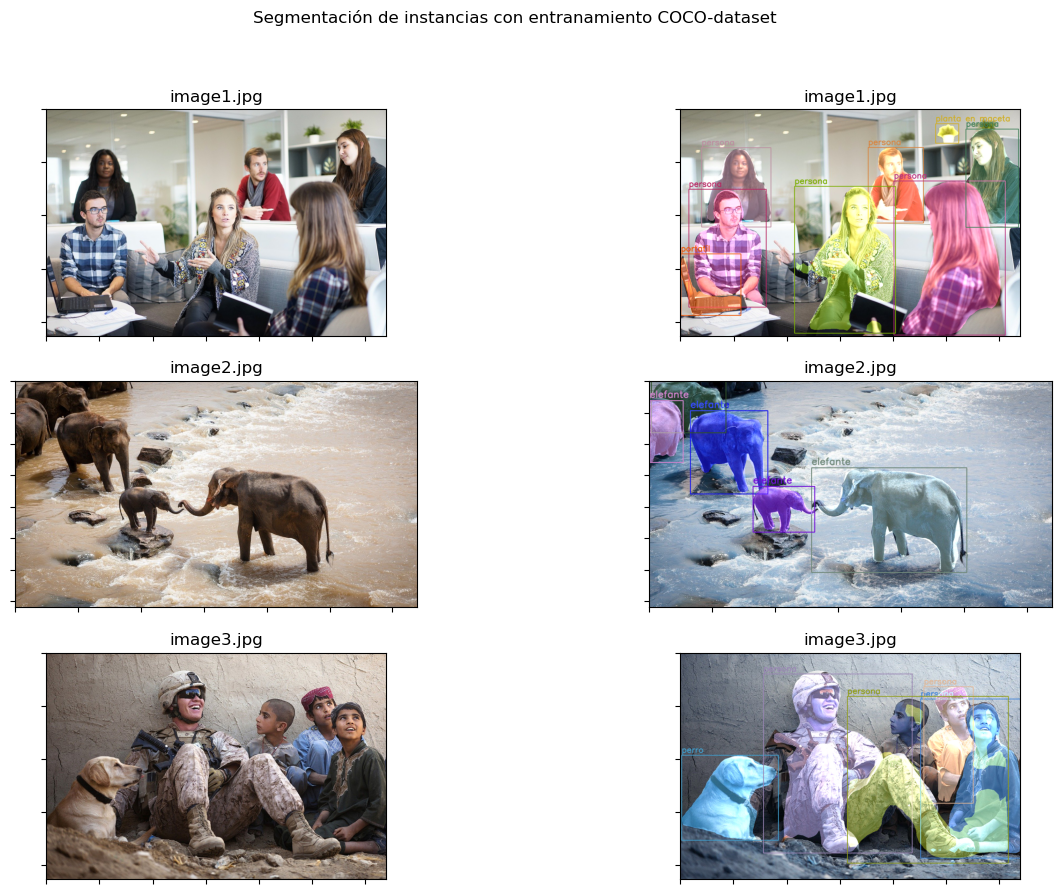
Leer la imagen y aplicar la segmentación de instancias#
Se Proporcionará la ruta donde se encuentren una serie de archivos con extensión de imagenes (jpg). El siguiente bloque de código lee la imagen y le aplica una segmentación de instancia mediante el modelo Mask R-CNN.
Show code cell source
extensions = ['jpg','jpeg']
file_names = [fn for fn in os.listdir(image_path) if any(fn.endswith(ext) for ext in extensions)]
N = len(file_names)
if N > 10: N=10 ## Máximo 10 figuras
fig, axs = plt.subplots(N, 2, figsize=(15, 10))
fig.suptitle('Segmentación de instancias con entranamiento COCO-dataset')
for i in range(N):
image = Image.open(image_path + "/" + file_names[i]).convert('RGB')
# Mantener una copia de la imagen original para las funciones de OpenCV y aplicar máscaras
orig_image = image.copy()
# Transformar la imagen
image = transform(image)
# Agregar una dimensión de lote
image = image.unsqueeze(0).to(device)
masks, boxes, labels = get_outputs(image, model, threshold)
result = draw_segmentation_map(orig_image, masks, boxes, labels)
# Visualizar la imagen original
axs[i, 0].set_title(file_names[i])
axs[i, 0].imshow(orig_image)
axs[i, 0].xaxis.set_ticklabels([])
axs[i, 0].yaxis.set_ticklabels([])
# Visualizar la imagen resultante
axs[i, 1].set_title(file_names[i])
axs[i, 1].imshow(result)
axs[i, 1].xaxis.set_ticklabels([])
axs[i, 1].yaxis.set_ticklabels([])
# set the save path
save_path = image_path + "/out/" + file_names[i]
if escribir_out: cv2.imwrite(save_path, result)
El conjunto COCO#
COCO, acrónimo de COmmon objects in COntext es un conjunto de datos orientado a la detección de objetos y a la segmentación (Tsung-Yi Lin et al., 2014). Está patrocinado por Microsoft y Facebook y colaboran especialistas en inteligencia artificial de Google.
La organización COCO permite descargar diferentes versiones (2014, 2015, 2017) en modo entrenamiento, test o validación. En este cuaderno se utiliza un conjunto de validación de 2017 por su reducido tamaño (5.000 objetos) para hacer una prueba de concepto de un proceso de entrenamiento. COCO está orientado a la segmentación de instancias por lo que permite entrenar un modelo Mask R-CNN. El formato de las anotaciones (”targets”) en COCO difieren algo en el formato con respecto a Mask R-CNN por lo que hay que realizar alguna pequeña transformación.
Especialmente hay que transformar las mascaras a través de una utilidades de la librería pycocotools.mask. Todo ello se desarrolla en la función formatCOCO_MaskRCNN:
Show code cell content
import pycocotools.mask as cocomask
def formatCOCO_MaskRCNN(img, targCOCO, device, index=None, transform = None):
#img = img.resize(imageSize)
#[[(int(i[0]), int(i[1])), (int(i[0]) + int(i[2]), int(i[1]) + int(i[3]))] for i in boxes]
#bboxes = [targCOCO[i]['bbox'] for i in range(len(targCOCO))]
iids = [targCOCO[i]['category_id'] for i in range(len(targCOCO))]
idx = [targCOCO[i]['image_id'] for i in range(len(targCOCO))]
areas = [targCOCO[i]['area'] for i in range(len(targCOCO))]
crowds = [targCOCO[i]['iscrowd'] for i in range(len(targCOCO))]
mmasks = []
bboxes = []
ie=0
for i in range(len(targCOCO)):
try:
rle = cocomask.frPyObjects(targCOCO[i]['segmentation'], img.size[1], img.size[0])
rle = cocomask.merge(rle)
m = cocomask.decode(rle)
mmasks.append(np.asarray(m))
## Se formatea la caja
box = targCOCO[i]['bbox']
bboxes.append([box[0], box[1], box[0] + box[2], box[1] + box[3]])
except:
ie+=1
#mmasks.append(np.asarray(m)[:,:,0])
#print("m=", len(m), len(m[0]), len(m[0][0]))
#print(m[-1])
boxes = torch.as_tensor(np.asarray(bboxes), dtype=torch.float32).to(device)
#labels = torch.ones(len(iids), dtype=torch.int64).to(device)
labels = torch.as_tensor(np.asarray(iids), dtype=torch.int64).to(device)
masks = torch.as_tensor(np.asarray(mmasks), dtype=torch.uint8).to(device)
image_id = torch.tensor(idx).to(device)
area = torch.as_tensor(np.asarray(areas)).to(device)
#iscrowd = torch.zeros(len(anns_obj), dtype=torch.int64).to(device)
iscrowd = torch.as_tensor(np.asarray(crowds), dtype=torch.int64).to(device)
target = {}
target["boxes"] = boxes
target["labels"] = labels
target["masks"] = masks
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
if ie > 0: print('Error formateando mascaras en idx={} en {}/{}'.format(index, ie, len(targCOCO)))
#if transforms is not None:
#img, target = transforms(img, target)
return img, target
Descarga del modelo COCO#
La descarga del modelo COCO se realiza desde la página de la organización COCO. Por un lado hay que descargar las imagenes y por otro un archivo con las anotaciones. Todo ello se recoge en la función DescargarModeloCOCO que sólo será preciso realizar una vez y que se controla con el flag downloadCOCOData a True
Show code cell content
#!pip install wget
import wget
import zipfile
def DescargarModeloCOCO():
site_url = 'http://images.cocodataset.org/zips/val2017.zip'
file_name = wget.download(site_url)
with zipfile.ZipFile('val2017.zip', 'r') as zip_ref:
zip_ref.extractall(image_path)
site_url = 'http://images.cocodataset.org/annotations/annotations_trainval2017.zip'
file_name = wget.download(site_url)
with zipfile.ZipFile('annotations_trainval2017.zip', 'r') as zip_ref:
zip_ref.extractall(image_path)
print("done!")
if downloadCOCOData:
DescargarModeloCOCO()
else:
print("No está activa la descarga del modelo COCO")
No está activa la descarga del modelo COCO
import torchvision.datasets as dset
try:
path2data=image_path + "/val2017"
path2json=image_path + "/annotations/instances_val2017.json"
coco_train = dset.CocoDetection(root = path2data, annFile = path2json)
print('Número de ejemplos: ', len(coco_train))
except:
print('No disponible el conjunto de entrada')
coco_train = []
loading annotations into memory...
Done (t=2.16s)
creating index...
index created!
Número de ejemplos: 5000
Realizar un entrenamiento con el conjunto COCO disponible#
Para hacer el entrenamiento se hace una carga del modelo maskrcnn_resnet50_fpn disponible en la librería torchvision que puede ser sin pre-entrenamiento o con pre-entrenamiento.
from torchvision.models.detection.mask_rcnn import MaskRCNN_ResNet50_FPN_Weights
# initialize the model
modelTrain = torchvision.models.detection.maskrcnn_resnet50_fpn(weights=MaskRCNN_ResNet50_FPN_Weights.COCO_V1, progress=True,
num_classes=91)
# set the computation device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# load the modle on to the computation device and set to eval mode
modelTrain.to(device).eval()
Show code cell output
MaskRCNN(
(transform): GeneralizedRCNNTransform(
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
Resize(min_size=(800,), max_size=1333, mode='bilinear')
)
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): FrozenBatchNorm2d(256, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(512, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(1024, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(2048, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
)
(1): Conv2dNormActivation(
(0): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
)
(2): Conv2dNormActivation(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
)
(3): Conv2dNormActivation(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
)
(layer_blocks): ModuleList(
(0-3): 4 x Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
)
(extra_blocks): LastLevelMaxPool()
)
)
(rpn): RegionProposalNetwork(
(anchor_generator): AnchorGenerator()
(head): RPNHead(
(conv): Sequential(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1))
(bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
(roi_heads): RoIHeads(
(box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2)
(box_head): TwoMLPHead(
(fc6): Linear(in_features=12544, out_features=1024, bias=True)
(fc7): Linear(in_features=1024, out_features=1024, bias=True)
)
(box_predictor): FastRCNNPredictor(
(cls_score): Linear(in_features=1024, out_features=91, bias=True)
(bbox_pred): Linear(in_features=1024, out_features=364, bias=True)
)
(mask_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(14, 14), sampling_ratio=2)
(mask_head): MaskRCNNHeads(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(1): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(2): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(3): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(mask_predictor): MaskRCNNPredictor(
(conv5_mask): ConvTranspose2d(256, 256, kernel_size=(2, 2), stride=(2, 2))
(relu): ReLU(inplace=True)
(mask_fcn_logits): Conv2d(256, 91, kernel_size=(1, 1), stride=(1, 1))
)
)
)
Carga del modelo pre-Entrenado#
Además se carga la configuración local que se almacenó en fichero en el anterior entrenamiento
print("Fichero a recuperar=", filename, 'device=', device)
try:
modelTrain.load_state_dict(torch.load(filename, map_location=torch.device(device))) #recovery trained model
modelTrain.to(device);
print(modelTrain)
except Exception as e:
print('No ha sido posible carga el modelo pre-entrenado')
print(e)
Show code cell output
Fichero a recuperar= data/coco_images/cocoMaskRCNN.pt device= cpu
MaskRCNN(
(transform): GeneralizedRCNNTransform(
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
Resize(min_size=(800,), max_size=1333, mode='bilinear')
)
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): FrozenBatchNorm2d(256, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(512, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(1024, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(2048, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
)
(1): Conv2dNormActivation(
(0): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
)
(2): Conv2dNormActivation(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
)
(3): Conv2dNormActivation(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
)
(layer_blocks): ModuleList(
(0-3): 4 x Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
)
(extra_blocks): LastLevelMaxPool()
)
)
(rpn): RegionProposalNetwork(
(anchor_generator): AnchorGenerator()
(head): RPNHead(
(conv): Sequential(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1))
(bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
(roi_heads): RoIHeads(
(box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2)
(box_head): TwoMLPHead(
(fc6): Linear(in_features=12544, out_features=1024, bias=True)
(fc7): Linear(in_features=1024, out_features=1024, bias=True)
)
(box_predictor): FastRCNNPredictor(
(cls_score): Linear(in_features=1024, out_features=91, bias=True)
(bbox_pred): Linear(in_features=1024, out_features=364, bias=True)
)
(mask_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(14, 14), sampling_ratio=2)
(mask_head): MaskRCNNHeads(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(1): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(2): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(3): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(mask_predictor): MaskRCNNPredictor(
(conv5_mask): ConvTranspose2d(256, 256, kernel_size=(2, 2), stride=(2, 2))
(relu): ReLU(inplace=True)
(mask_fcn_logits): Conv2d(256, 91, kernel_size=(1, 1), stride=(1, 1))
)
)
)
Optimizador#
Se utiliza el optimizador estándar, en esta caso, la nueva versión AdamW.
optimizer = torch.optim.AdamW(params=modelTrain.parameters(), lr=1e-5)
Carga de datos#
La carga de datos extrae por indice la imagen y sus anotaciones, los formatea de acuerdo a las necesidades de MaskRCNN y hace las correspondientes transformaciones a Tensor que necesita el modelo de entrenamiento
def loadData(idx, cocoDS, device):
image, target = cocoDS[idx]
image, target = formatCOCO_MaskRCNN(image, target, device, index=idx)
image = transform(image)
# Agregar una dimensión de lote
image = image.unsqueeze(0).to(device)
#target = torch.Tensor(target)
# Agregar una dimensión de lote
#target = target.unsqueeze(0).to(device)
return image, [target]
Proceso de entrenamiento#
Show code cell content
num_epochs = 1
best_loss = 1e10
batchSize = 1
numLotes = int(np.floor(len(coco_train)/batchSize))
numT = len(coco_train)
scaler=None
print("device=", device)
# Train the model
for epoch in range(num_epochs):
if not entrenamiento:
print("No habilitada la opción de entrenamiento")
break
correct = 0
total = 0
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
epoch_samples = 0
epoch_loss = 0
ie = 0
modelTrain.train()
for i in range(numLotes):
#images, targets = loadData(i, numT, batchSize, coco_train, device)
images, targets = loadData(i, coco_train, device)
#print(targets)
optimizer.zero_grad()
try:
loss_dict = modelTrain(images, targets)
losses = sum(loss for loss in loss_dict.values())
epoch_loss += losses / len(images)
losses.backward()
optimizer.step()
except Exception as err:
print(f"Unexpected {err=}, {type(err)=}")
ie+=1
epoch_samples += len(images)
if i % 10 == 0:
print("Batch=" + str(i) + "/" + str(numLotes))
if epoch_loss < best_loss:
print(f"Salvando el mejor modelo en {filename} con excepciones {ie}/{len(coco_train)}")
best_loss = epoch_loss
torch.save(modelTrain.state_dict(), filename)
print ('Final de Entrenamiento')
device= cpu
No habilitada la opción de entrenamiento
Final de Entrenamiento
Resultado Gráfico#
device='cpu'
print("Fichero a recuperar=", filename, 'device=', device)
try:
modelTrain.load_state_dict(torch.load(filename, map_location=torch.device(device))) #recovery trained model
modelTrain.to(device).eval();
print(modelTrain)
except Exception as e:
print('No ha sido posible carga el modelo pre-entrenado')
print(e)
Show code cell output
Fichero a recuperar= data/coco_images/cocoMaskRCNN.pt device= cpu
MaskRCNN(
(transform): GeneralizedRCNNTransform(
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
Resize(min_size=(800,), max_size=1333, mode='bilinear')
)
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): FrozenBatchNorm2d(256, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(512, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(1024, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(2048, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
)
(1): Conv2dNormActivation(
(0): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
)
(2): Conv2dNormActivation(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
)
(3): Conv2dNormActivation(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
)
(layer_blocks): ModuleList(
(0-3): 4 x Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
)
(extra_blocks): LastLevelMaxPool()
)
)
(rpn): RegionProposalNetwork(
(anchor_generator): AnchorGenerator()
(head): RPNHead(
(conv): Sequential(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1))
(bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
(roi_heads): RoIHeads(
(box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2)
(box_head): TwoMLPHead(
(fc6): Linear(in_features=12544, out_features=1024, bias=True)
(fc7): Linear(in_features=1024, out_features=1024, bias=True)
)
(box_predictor): FastRCNNPredictor(
(cls_score): Linear(in_features=1024, out_features=91, bias=True)
(bbox_pred): Linear(in_features=1024, out_features=364, bias=True)
)
(mask_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(14, 14), sampling_ratio=2)
(mask_head): MaskRCNNHeads(
(0): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(1): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(2): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
(3): Conv2dNormActivation(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
)
)
(mask_predictor): MaskRCNNPredictor(
(conv5_mask): ConvTranspose2d(256, 256, kernel_size=(2, 2), stride=(2, 2))
(relu): ReLU(inplace=True)
(mask_fcn_logits): Conv2d(256, 91, kernel_size=(1, 1), stride=(1, 1))
)
)
)
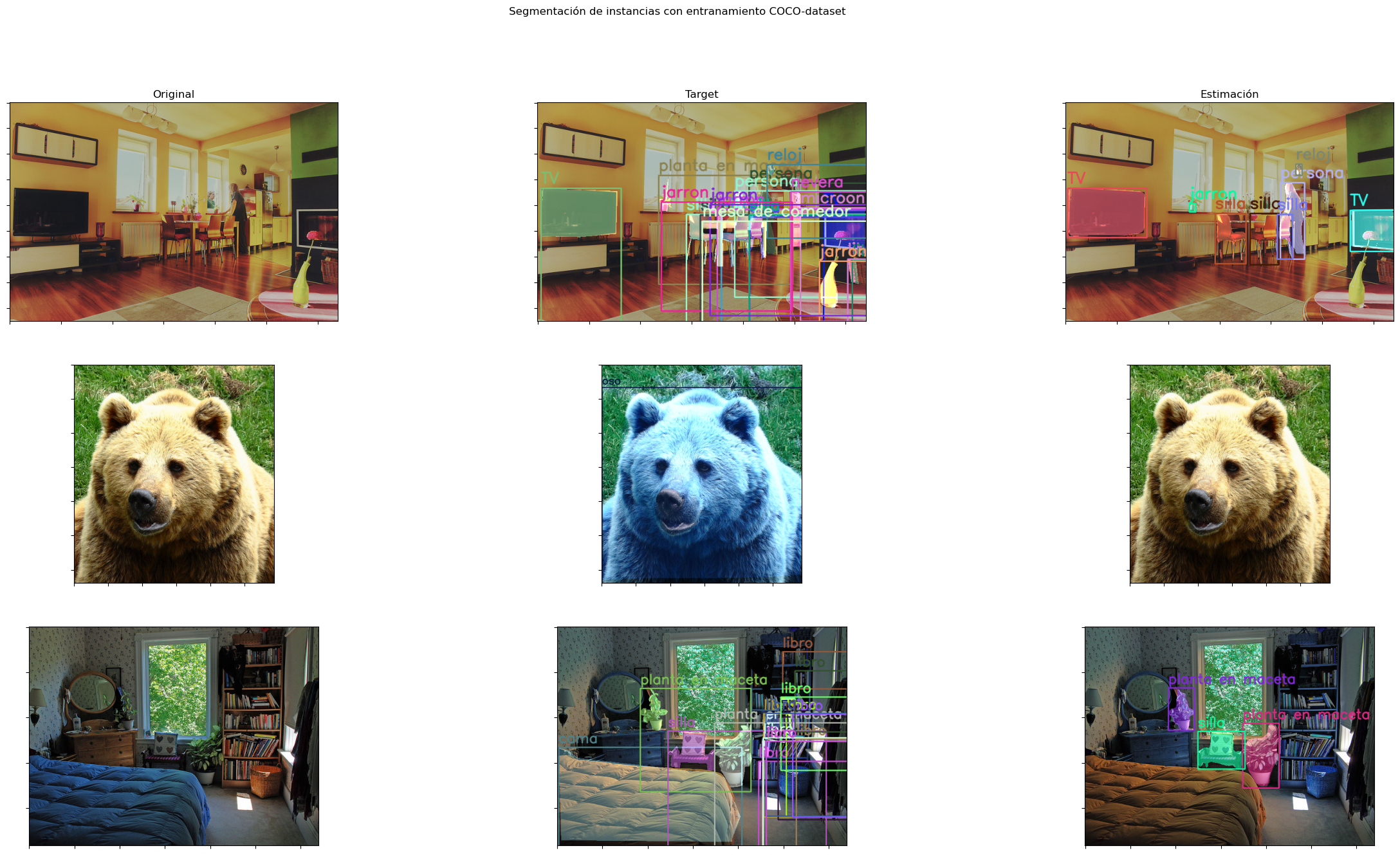
Resultado gráfico#
Show code cell source
N = min(3, len(coco_train))
if N>0:
fig, axs = plt.subplots(N, 3, figsize=(30, 15))
fig.suptitle('Segmentación de instancias con entranamiento COCO-dataset')
axs[0, 0].set_title('Original')
axs[0, 1].set_title('Target')
axs[0, 2].set_title('Estimación')
else:
print('No hay conjunto de pruebas disponible')
for i in range(N):
#image = Image.open(image_path + "/" + file_names[i]).convert('RGB')
image, target = coco_train[i]
img2, target2 = formatCOCO_MaskRCNN(image, target, device)
# Mantener una copia de la imagen original para las funciones de OpenCV y aplicar máscaras
orig_image = image.copy()
# Transformar la imagen
image = transform(image)
# Agregar una dimensión de lote
image = image.unsqueeze(0).to(device)
masks, boxes, labels = get_outputs(image, modelTrain, threshold)
result2 = draw_segmentation_map(orig_image, masks, boxes, labels)
## Resultado del objetivo cargado en COCO
result = draw_segmentation_map(orig_image, target2['masks'], get_boxes_out(target2['boxes']), get_names_out(target2['labels']))
# Visualizar la imagen original
#axs[i, 0].set_title(file_names[i])
axs[i, 0].imshow(orig_image)
axs[i, 0].xaxis.set_ticklabels([])
axs[i, 0].yaxis.set_ticklabels([])
# Visualizar la imagen resultante
#axs[i, 1].set_title(file_names[i])
axs[i, 1].imshow(result)
axs[i, 1].xaxis.set_ticklabels([])
axs[i, 1].yaxis.set_ticklabels([])
axs[i, 2].imshow(result2)
axs[i, 2].xaxis.set_ticklabels([])
axs[i, 2].yaxis.set_ticklabels([])
# set the save path
save_path = image_path + "/out/" + file_names[i]
if escribir_out: cv2.imwrite(save_path, result)
Error formateando mascaras en idx=None en 1/18